Datasheet 搜索 > 微控制器 > Microchip(微芯) > PIC16C74A-04/P 数据手册 > PIC16C74A-04/P 开发手册 1/34 页
 器件3D模型
器件3D模型¥ 88.258
PIC16C74A-04/P 开发手册 - Microchip(微芯)
制造商:
Microchip(微芯)
分类:
微控制器
封装:
DIP-40
描述:
MICROCHIP PIC16C74A-04/P 微控制器, 8位, 一次性可编程, PIC16C7xx, 10 MHz, 7 KB, 192 Byte, 40 引脚, DIP
Pictures:
3D模型
符号图
焊盘图
引脚图
产品图
页面导航:
原理图在P7P8






导航目录
PIC16C74A-04/P数据手册
Page:
of 34 Go
若手册格式错乱,请下载阅览PDF原文件
1997 Microchip Technology Inc. DS00616A-page 1
INTRODUCTION
This application note describes the basic issues that
need to be addressed in order to implement digital sig-
nal processing systems using the PIC16C74 and
provides application code modules and examples for
DTMF tone generation, a 60 Hz notch filter, and a
simple PID compensator for control systems. These
routines can also be used with other PIC16C6X and
PIC16C7XXX processors with minor modifications and
the addition of external analog I/O devices.
The use of general purpose microcontrollers for
low-end digital signal processing applications has
become more commonplace these days with the avail-
ability of higher speed processors. Since most signal
processing systems consist of a host processor and
dedicated DSP chip, the use of a single microcontroller
to perform both these functions provides a simpler and
lower cost solution. In addition, the single chip design
will consume less power which is ideal for battery
powered applications. The PIC16C74 with its on-chip
A/D, PWM module, and fast CPU is an ideal candidate
for use in these low-bandwidth signal processing
applications.
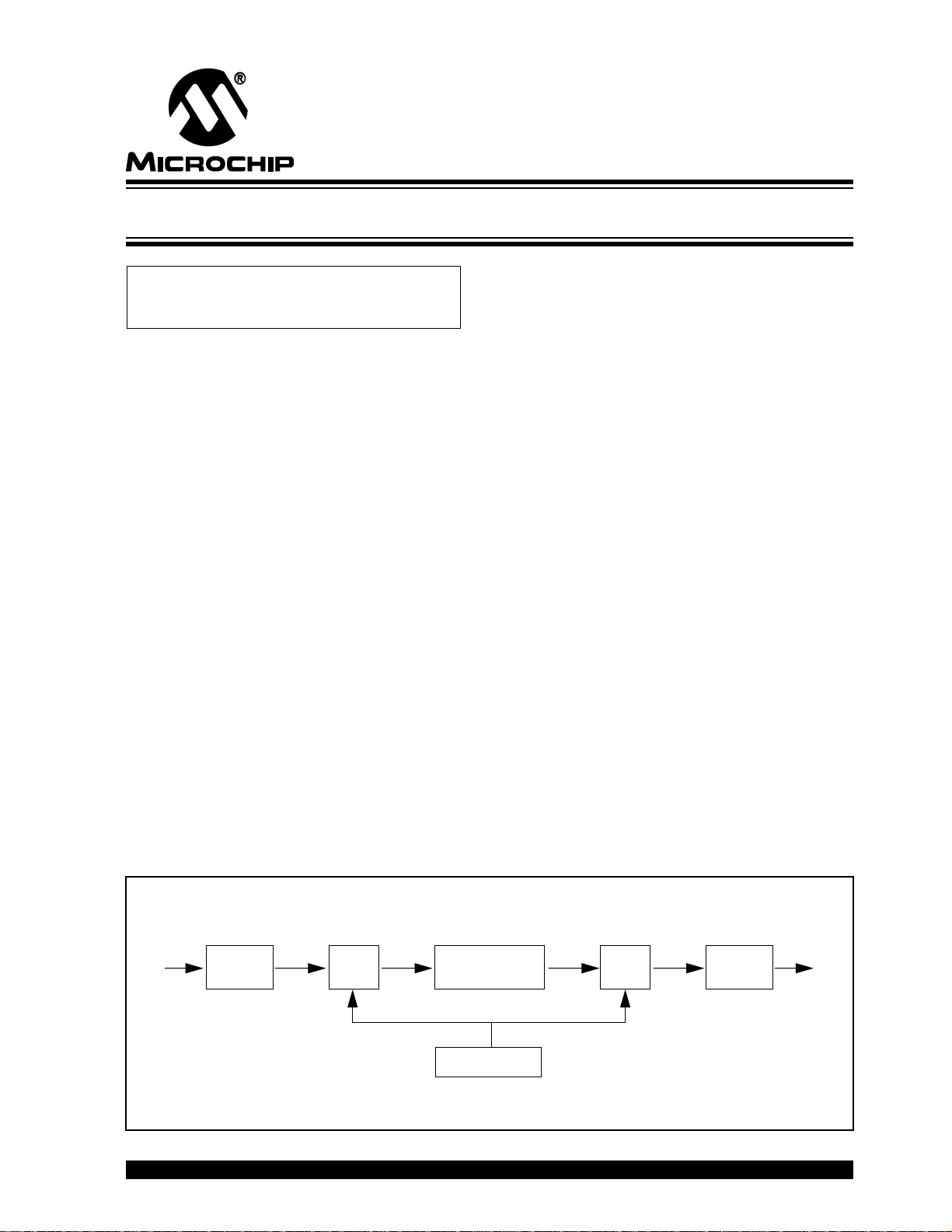
A typical signal processing system includes an A/D
converter, D/A converter, and CPU that performs the
signal processing algorithm as shown in Figure 1.
Author: Darius Mostowfi
Design Consultant
The input signal,
x(t)
, is first passed through an input
filter (commonly called the anti-aliasing filter) whose
function is to bandlimit the signal to below the Nyquist
rate (one half the sampling frequency) to prevent
aliasing. The signal is then digitized by the A/D
converter at a rate determined by the sample clock to
produce
x(n)
, the discrete-time input sequence. The
system transfer function,
H(z)
, is typically implemented
in the time-domain using a difference equation. The
output sample,
y(n)
, is then converted back into the
continuous-time signal,
y(t)
, by the D/A converter and
output low-pass filter.
The calculation of the output signal using a difference
equation requires a multiply and accumulate (MAC)
operation. This is typically a single-cycle instruction on
DSP chips but can take many cycles to perform on a
standard microcontroller since it must be implemented
in code. Since the digitization of the signal, calculation
of the output, and output to the D/A converter all must
be completed within the sample clock period, the speed
at which this can be done determines the maximum
bandwidth that can be achieved with the system. The
relatively slow speed of most microcontrollers is the
major limitation when they are used in DSP applica-
tions but the PIC16C74’s fast instruction execution
speed (as fast as 200 ns/instruction) can provide the
performance required to implement relatively low band-
width systems. In addition, the device’s on-chip A/D and
PWM modules provide all the functions needed for a
single chip system. Only a few external components
are needed to use the PIC16C74 for tone generation,
filtering of transducer signals, or low bandwidth control.
FIGURE 1: TYPICAL SIGNAL PROCESSING SYSTEM
X[t]
A/D
X[n]
System Clock
Y[n]
Y[t]
Low-pass
Filter
D/A
Low-pass
Filter
H[z]
AN616
Digital Signal Processing with the PIC16C74
器件 Datasheet 文档搜索
AiEMA 数据库涵盖高达 72,405,303 个元件的数据手册,每天更新 5,000 多个 PDF 文件
